As expected the feature set for the MR16P-4 (see Photo 1) is similar to the original Satori MW16P. The MR16P-4 is built on a cosmetically attractive six-spoke frame that has a minimal reflective footprint behind the cone to reduce reflections and a completely open area beneath the spider mounting shelf for enhanced cooling, both highly desirable attributes. Additional cooling is provided by venting the voice coil former and a 12 mm diameter pole vent. The spider mounting shelf itself is pinned to the frame to limit vibration transfer from the frame to this part of the suspension system. The neodymium motor cup attaches to the bottom of the frame and has a separate cosmetic/heatsink part that looks like the continuation of the frame attached to the peripheral of the motor.
The motor is comprised of a neodymium ring magnet and the cup that completes the field and forms the gap area. In addition, there is an overhung copper sleeve shorting ring to reduce distortion. The device uses a 36 mm (1.4”) diameter voice coil with a nonconducting fiberglass former wound with round copper-clad aluminum wire (CCAW) and terminated to a pair of gold-plated terminals located on opposite sides of the frame to minimize rocking modes.
The cone and the dust cap material are also unique and composed of 60% pure Egyptian papyrus parchment fibers, a very expensive but light and stiff material. Suspension is provided by a nitrile butadiene rubber (NBR) surround that uses a special vertical and horizontal attachment process, along with a Dr. Kurt Muller Bimax spider. Bimax is purported to have less twisting tendencies compared to other cloth spider materials.
I used the LinearX LMS analyzer and VIBox to create voltage and admittance (current) curves with the MR16P-4 clamped to a rigid test fixture in free-air at 0.3, 1, 3, and 6 V. Since the MR16P-4 has 3.1 mm Xmax, it stayed linear enough for LEAP 5 to get a good curve fit on the 6 V sweep. It should also be noted that this multi-voltage parameter test procedure includes heating the voice coil between sweeps for progressively longer periods to simulate operating temperatures at that voltage level to raise the winding temperature to the third time constant.
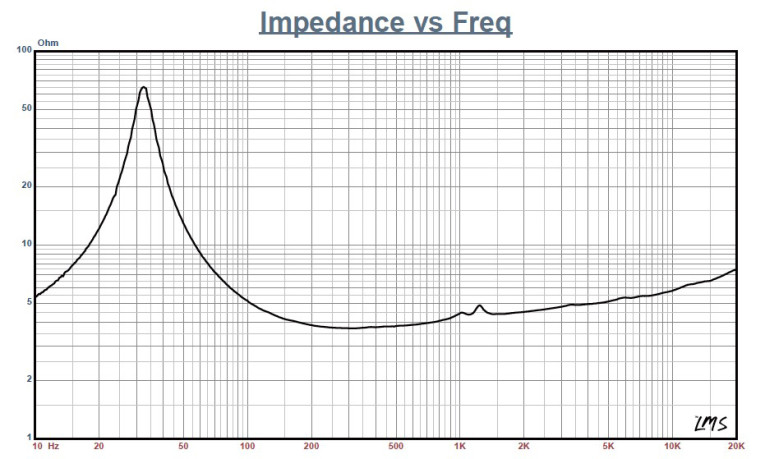
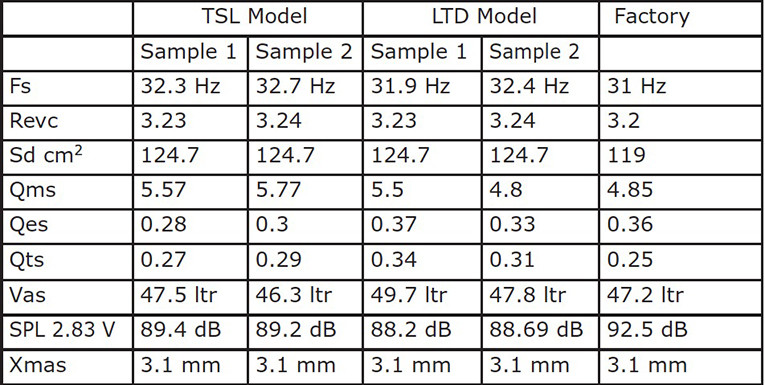
I post-processed the ten 550-point stepped sine wave sweeps for each MR16P-4 sample and divided the voltage curves by the current curves (admittance) to create impedance curves, phase added using the LMS calculation method and uploaded them, along with the accompanying voltage curves, to the LEAP 5 Enclosure Shop software. Besides the LEAP 5 LTD model results, I additionally created a LEAP 4 TSL model set of parameters using just the 1 V free-air curves. I selected the final data, which includes the multiple voltage impedance curves for the LTD model and the 1 V impedance curve for the TSL model, and created the parameters to perform the computer box simulations. Figure 1 shows the 1 V free-air impedance curve. Table 1 compares the LEAP 5 LTD and TSL data and for both of MR16P-4 samples as well as the factory parameters.
LEAP parameter calculation results for the MR16P-4 were pretty much in line with the SB Acoustics factory parameters, however, the sensitivity posted by SB Acoustics for this model was 3 dB or higher than the LEAP 5 sensitivity calculations. SB Acoustics doesn’t post how it calculates sensitivity, so this is likely a sound pressure level (SPL) average rather than calculated as part of the Thiele-Small (T-S) routine. Now, it is obvious that a midrange driver such as this will never get used in its piston range and probably crossed over between 200 to 300 Hz, which is substantially higher in frequency than its piston range performance. The reason I go through the box simulation exercise is to get an idea of the frequency and Q of the impedance resonance, as this information is useful if you are designing a passive high-pass section of a passive band-pass network.
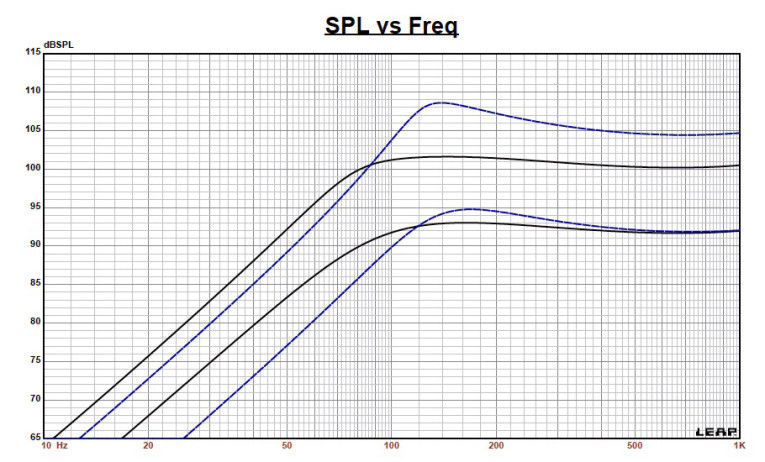
Given this, I set up computer enclosure simulations using the LEAP LTD parameters for Sample 1. I set up two box simulations, one sealed Butterworth (Qtc = 0.7) alignment and another sealed box Chebychev alignment (Qtc close to 1). For the Butterworth closed box simulation, I used a 0.27 ft3 enclosure with 50% fiberglass fill material, and for the Chebychev sealed box simulation, a 0.1 ft3 also with 50% fiberglass fill material.
Figure 2 shows the results for the MR16P-4 in the two sealed enclosures at 2.83 V and at a voltage level sufficiently high enough to increase cone excursion to 3.66 mm (Xmax + 15%). This yielded a F3 = 81 Hz (F6 = 63 Hz) with a box/driver Qtc of 0.7 for the 0.27 ft3 sealed enclosure and a –3 dB = 113 Hz (-6 dB = 94 Hz) Qtc = 0.93 for the 0.1 ft3 sealed box simulation.

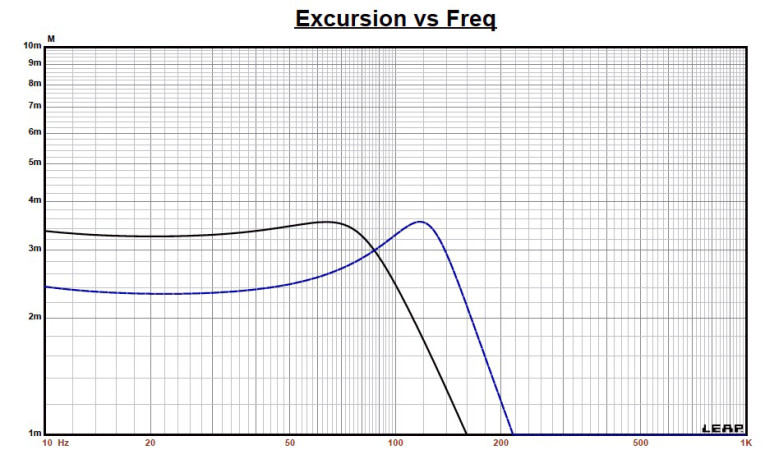
Increasing the voltage input to the simulations until the maximum linear cone excursion was reached resulted in 101.8 dB at 8 V for the larger sealed enclosure simulation and 108.5 dB with a 14.5 V input level for the smaller sealed box. Figure 3 shows the 2.83 V group delay curves. Figure 4 the 8 V/14.5 V excursion curves.) Again, since this midrange driver will likely be high-passed above 200 Hz, the maximum SPL will be several decibels higher that its maximum piston range SPL.
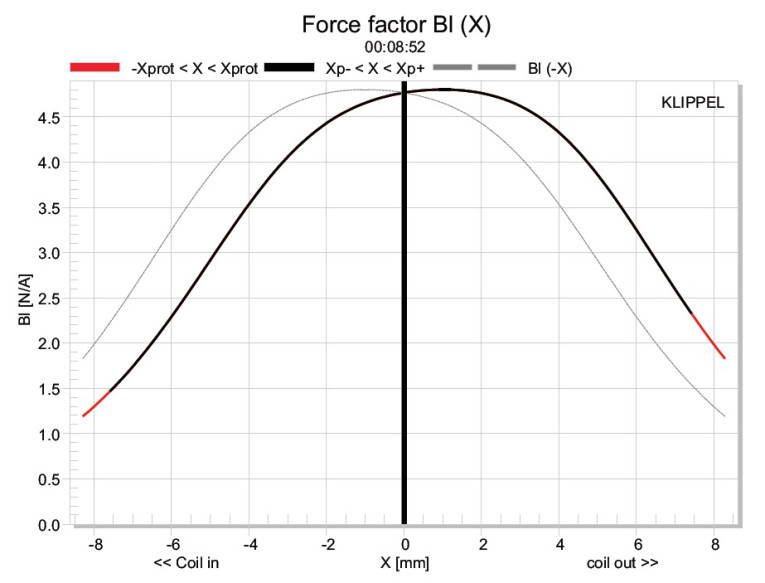
Klippel analysis on a midrange in one respect isn’t really necessary, as the driver is not expected to operate in its range. However, I think it’s good to look at the data just to see how well balanced the device is. Our analyzer is provided courtesy of Klippel GmbH and Patrick Turnmire, of Redrock Acoustics, performs the testing. Klippel analysis for the MR16P-4 produced the Bl(X), Kms(X), and Bl and Kms symmetry range plots shown in Figures 5–8. The Bl(X) curve for the MR16P-4 (see Figure 5) is fairly symmetrical with some obvious coil-out offset. Looking at the Bl symmetry plot (see Figure 6), this curve shows a trivial coil forward (coil out) offset at the 2 mm position (a point of reasonable certainty) of 0.85 mm that was fairly constant out to the MR16P-4’s physical Xmax.
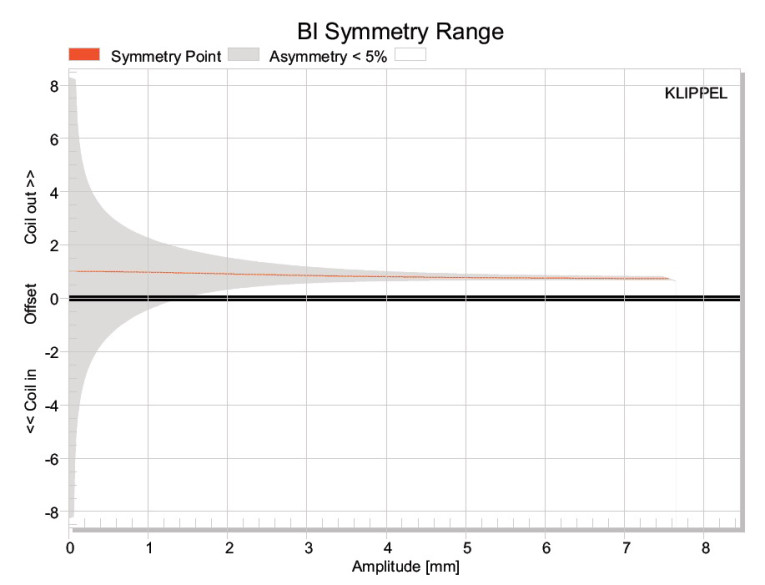
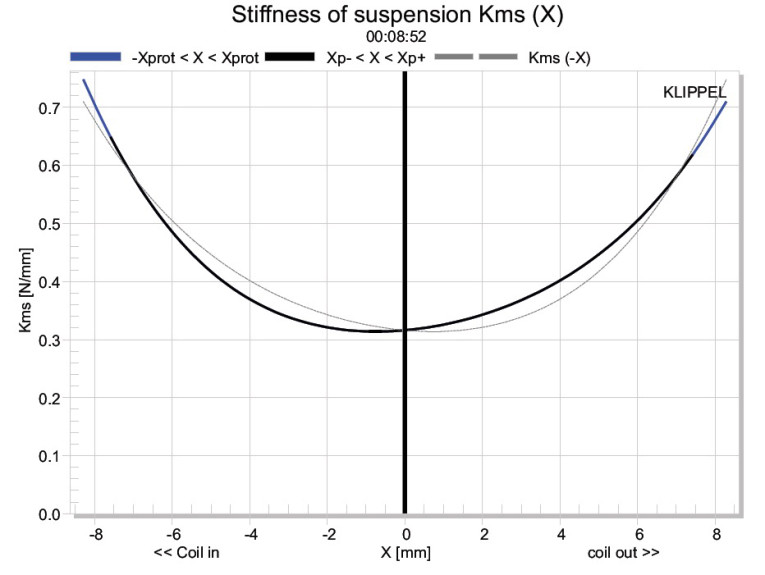
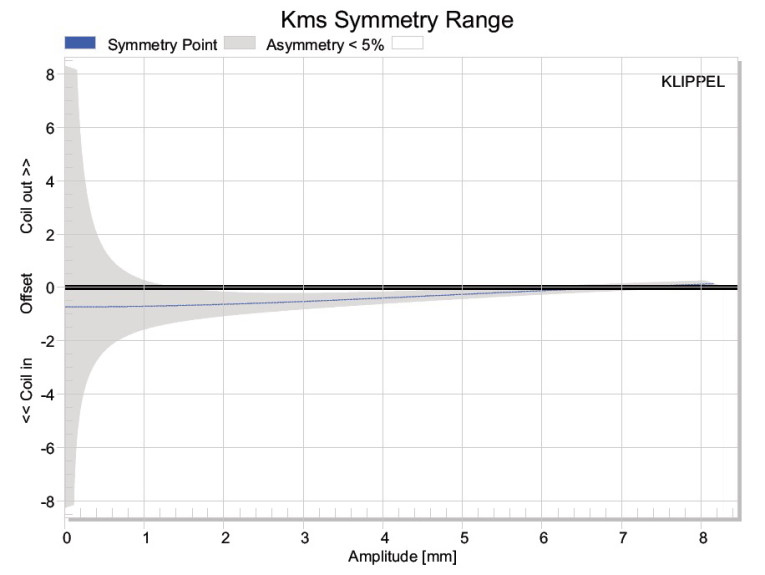
It’s likely just a small coil forward offset that easily could be deliberate. Note that the data at rest has a fair degree of uncertainty (the expanding grey area indicates the level of uncertainty of the graph), but a high degree of certainty at the 3 mm position. Figure 7 and Figure 8 give the Kms(X) and Kms symmetry range curves for the MR16P-4. The Kms(X) curve looks rather symmetrical in both directions with some minor offsets in the coil position as reflected in the Kms symmetry range curve. The coil-in offset displayed in the Kms symmetry range curve is only 0.52 mm at the MR16P-4’s physical Xmax, so both Bl and compliance are well balanced, even if this were a woofer operating in its piston range.
Displacement limiting numbers calculated by the Klippel analyzer for the MR16P-4P were XBl at 82% Bl = 3.3 mm and for crossover (XC) at 75% Cms minimum greater than 4.5 mm, which means that for the MR16P-4, if the driver was operating in the piston range, which it will likely not be, the Bl was the limiting factor for a distortion level of 10%, and it was greater than the driver’s physical Xmax.
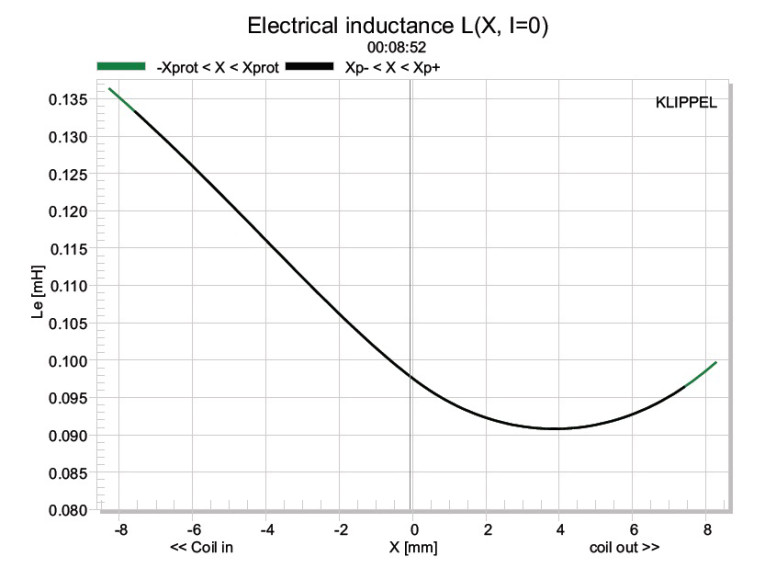
Figure 9 gives the inductance curves L(X) for the MR16P-4. The curve indicates an increasing inductance as the coil moves inward, however, there is only a minor change in inductance throughout the driver’s operating range—a key to low distortion performance is the motor’s copper shorting ring (Faraday shield). Inductance change from the rest position to Xmax coil-out position was only 0.09 mH, and slightly more, 0.11 mH to the Xmax coil-in position, which is really excellent performance if it were a woofer.
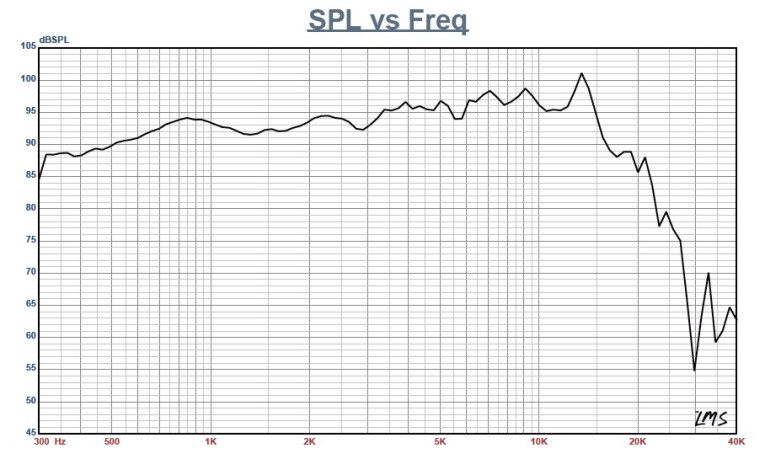

Next, I mounted the MR16P-4 in an enclosure that had a 17” × 8” baffle and was filled with damping material (foam). Then, I measured the DUT on and off axis from 300 Hz to 40 kHz frequency response at 2.83 V/1 m using a 100-point gated sine wave sweep. Figure 10 shows the MR16P-4’s on-axis response displaying a smooth rising response to about 2.75 kHz, followed by a shallow 5 dB decline to 10 kHz, followed by the drivers second-order low-pass roll off.
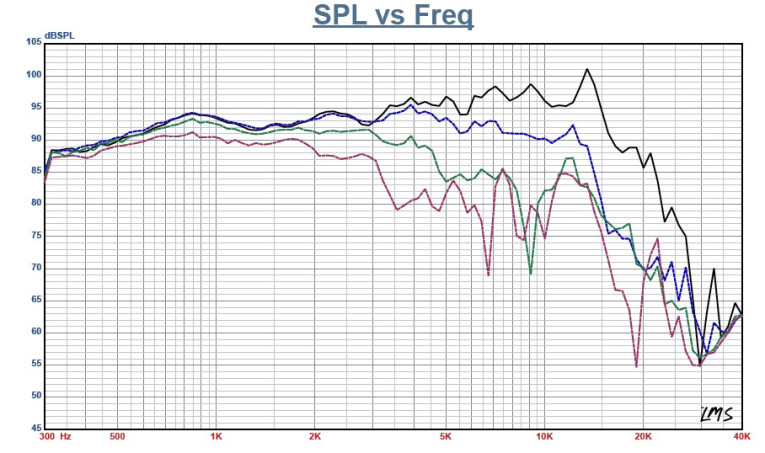
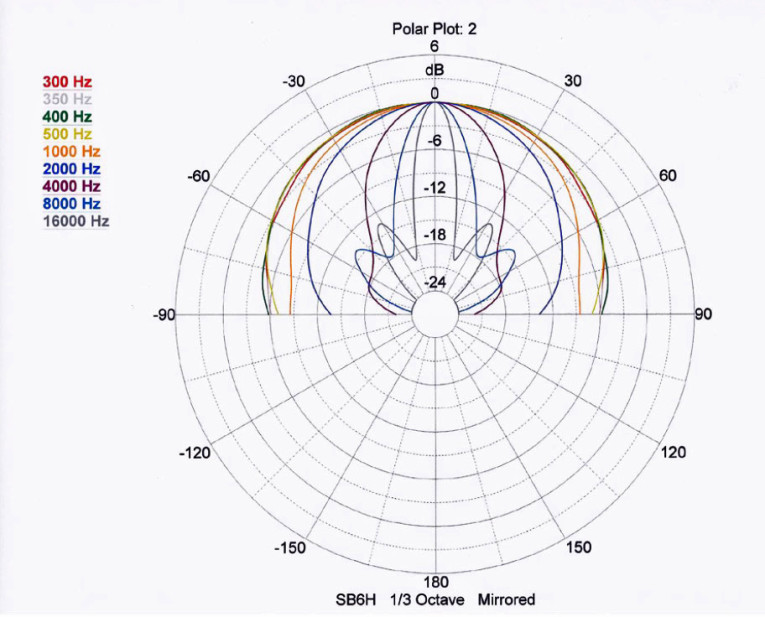
Figure 11 depicts the on- and off-axis frequency response at 0°, 15°, 30°, and 45° with the normalized view shown in Figure 12, and the associated CLIO polar plot shown in Figure 13. The -3 dB at 30°s with respect to the on-axis curve occurs at 3.1 kHz, so a cross point in that vicinity should work well to achieve a reasonable power response. Figure 14 shows the two-sample SPL comparisons, showing a close match up over the operating range of this driver, with a 5 dB peak at 13.5 kHz just prior to the low-pass roll-off of the transducer.
I employed the Listen, Inc. SoundConnect analyzer and SCM-2 microphone (courtesy of Listen, Inc.) to measure distortion and generate time-frequency plots. Setting up for the distortion measurement consisted of mounting the woofer rigidly in free air and setting the SPL to 94 dB at 1 m (6.42 V) using a noise stimulus (SoundCheck 14 has a software generator and SPL meter as two of its utilities). Then, I measured the distortion with the Listen microphone placed 10 cm from the dust cap. This produced the distortion curves shown in Figure 15 (note this is now being displayed on a log scale).


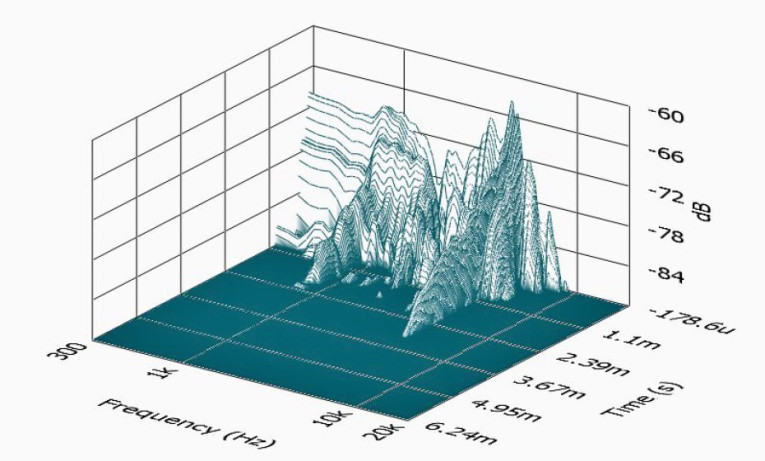
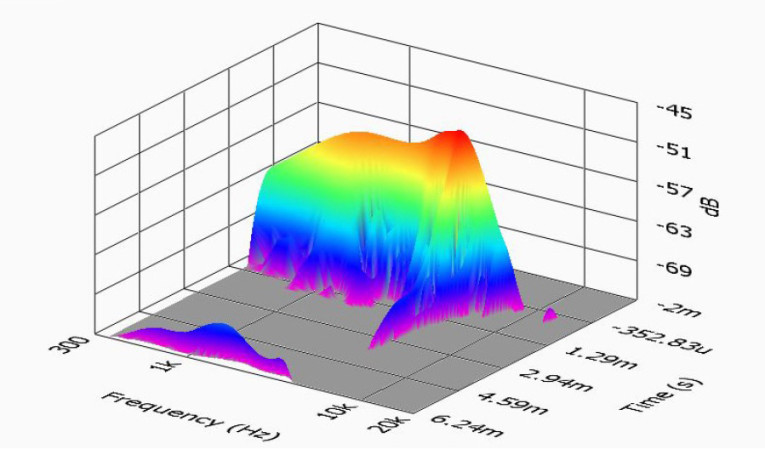
Last, I employed the SoundCheck analyzer to get a 2.83 V/1 m impulse response and imported the data into Listen’s SoundMap Time/Frequency software. Figure 16 shows the resulting cumulative spectral decay (CSD) waterfall plot. Figure 17 shows the Wigner-Ville logarithmic surface map plot (used for its better low-frequency performance).
Looking over all the data presented, I would conclude that the MR16P-4 is a well-designed midrange, especially given the fact that the design comes from former Scan-Speak engineers! For more information, visit www.sbacoustics.com.
This article was published originally in Voice Coil, January 2017.